上一篇: DIY自制低成本激光扫描仪 EZScan3D基本操作
A. 径向失真简介:
由于设计和加工误差,头都会带有一些失真。虽然失真可以不规则或很多模式,最常遇到的是扭曲径向对称失真。径向失真通常可以划分为两个主要类型:
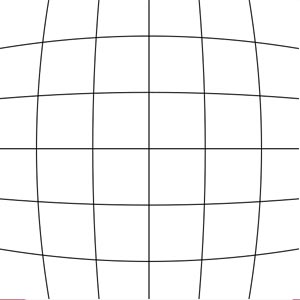
桶形失真:(如右边的图像显示)
在桶形失真中,图像放大率随光轴的距离增加而减少。其表现形式是,直线围绕一个球体(或桶)弯曲的图像,其形状像酒桶。这失真被用于设计鱼眼镜头,将无限宽广的区域压缩到有限的图像区域。 |
 |
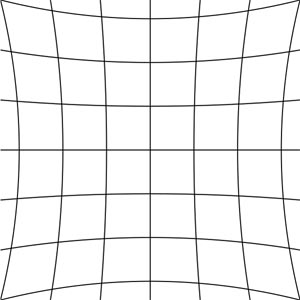
枕形失真:(如右边的图像显示)
在枕形失真中,图像放大率随光轴的距离增加而增加。其表现形式是,不通过图像中心的直线向外弯曲,其形状像枕头。 |
 |
从数学角度来说,桶形和枕形失真是二阶变形,也就是说变形量和中心距离平方成线性关系。笔者在EZScan3D中采用简化的布朗模型来纠正桶形和枕形失真。在这个简化模型中只有一个参数K1,K1>0用于纠正镜头桶形失真,K1<0用于纠正镜头枕形失真。
B.在EZScan3D中纠正径向失真
使用此功能前,你需要用你的摄像头获取一张图片。你可以釆用标定板做样板。鼠标点击 EZScan3D菜单'功能'->'开视频',打开视频。点击EZScan3D菜单'功能'->'纠正径向失真'启动纠正径向失真视窗。在 K1的右边输入栏中输入适当的数值,然后点击'应用'按键,你会看到图像的变化。调整K1值,使径向失真最小。特别是靠近边缘的点应尽量对齐,在一条直线 上。左右两边的垂直直线应保持笔直。以下两图像(左侧)校正前和(右侧)校正后。所采用的数值是K1= 0.05。在得正确的K1数值后,点击EZScan3D菜单'功能'->'系统设置',打开系统设置文件。将0.05输入fK1右边。在fK1与 0.05之间留一空格。然后保存修改后的系统设置文件。这样径向失真的纠正完成了。

桶形失真校正前 |

桶形失真校正后 |
下一篇: DIY自制低成本激光扫描仪 EZScan3D 常见问题

|
